
高速度物体検出SDK
距離計測をベースとした障害物検出および識別が可能ステレオ相関法をベースに開発し、高速に障害物を検出・判別することを目的として作られたソフトウェアです。 レンジファインダー等と比較して安全性が高く、幅広い環境に対応可能です。輝度の変化に自動的に対応し、アンバランスになった場合に自動的に補正する機能も有しております。
ラインナップ
- 高速度物体検出SDK [AVS-Hod3D-SDK]
特長
■ステレオカメラのみの画像情報を用いて対象物の検出、判別が可能
レーザーやセンサー等を使わずに、カメラからの画像情報のみで物体の検出が可能になっております。
■広い輝度範囲に適用
輝度の経時変化に自動的に対応。 一般の相関ステレオ法では2台のカメラの輝度がアンバランスになった場合に、距離計測の誤差が急激に増加する問題が発生しますが、本ソフトウェアは自動的にカメラ間で自動補正する機能を搭載。
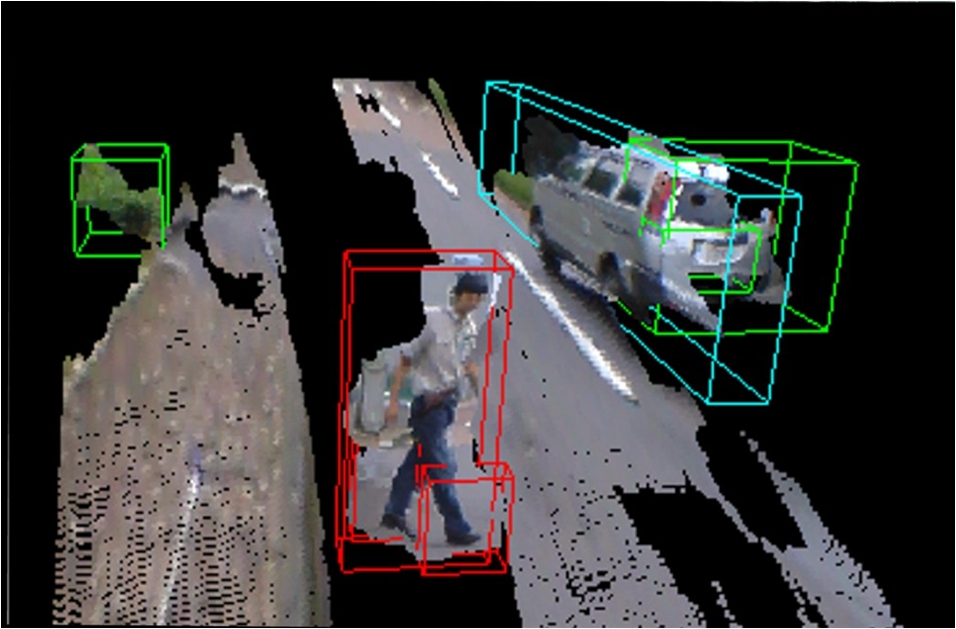
■対象物の検出と識別
3次元計測データから、道路上の対象物を分離し判別する機能を搭載。形状のデータのみからおおまかな分類の識別が可能。
用途
- 移動体からの物体検出、分類
応用事例
注意事項
別途、当社カメラキャリブレーションソフトウェアシステムが必要となります。

◆質問や資料請求など、ご気軽にお問い合わせください