
ステレオ画像による3次元計測
キャリブレーション
カメラで三角測量を行うためには、ステレオを構成するカメラの位置姿勢と空間中の点がどのように画像に写るかを知る必要があります。
これは3次元から2次元への射影変換として表すことができます。変換はどのカメラでも同じ形の式を使いますが、その係数はカメラパラメータと呼ばれ、同機種のカメラやレンズを使っていても個体によって異なるものです。
このカメラパラメータを求めることをキャリブレーション(較正)といいます。キャリブレーションはステレオ画像による3次元計測を行う前に必須の作業です。
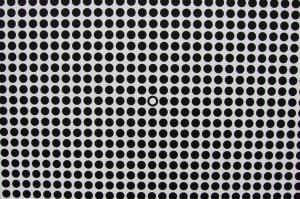
キャリブレーションは大きさが既にわかっている図形パターンを、位置などを変えて数回撮影し、その画像を元にカメラパラメータを計算することで行います。
当社では水玉模様の独自パターンを定めて使用しています。
キャリブレーション技術も独自のもので、数学的な裏付けはもちろんのこと、作業の簡単さや精度に関するノウハウも含めて具体化しており、他社にひけをとらないものと自負しています。
ところで、レンズを通して撮影した画像で、直線であるはずのものが湾曲して写ることがよく起こります。
これはレンズ歪みと呼ばれ、広角レンズを使用すると特にわかります。キャリブレーションを行う際にはこのレンズ歪みを補正する必要があります。そのため当社は魚眼を含めて各種レンズの歪み補正を行うことができます。
レンズだけでなく、カメラを内蔵した人型ロボット頭部のシールドや水中撮影用気密容器、水槽などにも対応しています。
歪み補正はキャリブレーションと無関係に単独で使うこともあります。
- ●魚眼カメラの歪み補正の実績事例
・魚眼カメラ画像の平面化
・全周囲画像の貼り合わせ
●水中撮影対応の実績事例
・水中での3次元計測