
ソリューション:実績事例
マテリアル・ハンドリング
袋状積載物対象のマテリアル・ハンドリング
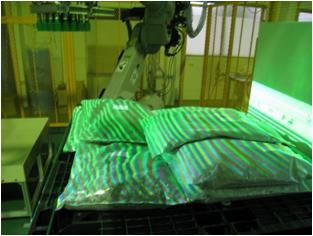
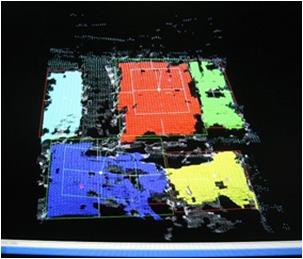
ステレオカメラを用いて袋状積載物の位置と姿勢を計測し、ティーチング無しに袋状積載物のピッキングを行うことができる。これにより、デパレタイジング(積み荷の運び降ろし作業)をロボット制御で自動化し、3K環境における作業者の負担を軽減できる。
本プロジェクトにおいて、当社は、ビジョン部分を担当している。ステレオカメラ画像からハンドリングすべき袋状積載物の3次元位置を算出し、ロボットハンドの制御情報をロボットに渡している。
積み方や形状が一定しない対象物について、ティーチング無しにハンドリングすることを実現している。
平成22年度戦略的基盤技術高度化支援事業として実施。
地方独立行政法人山口県産業技術センター、株式会社YOODS、旭興産株式会社との共同開発。
<撮影の様子> <システム認識イメージ>
<システムの外観>
※こちらより、デモ映像をご覧頂けます。
<袋状積載物を対象としたマテリアル・ハンドリングシステム>
【映像提供:旭興産株式会社】