
ステレオ画像による3次元計測
ステレオ対応検出
空間中のある一点を二つのカメラで同時に撮影したとき、それぞれの画像中に写ったその点をステレオ対応点と呼びます。 ステレオ対応点とカメラパラメータから計測対象点の3次元座標を計算します。
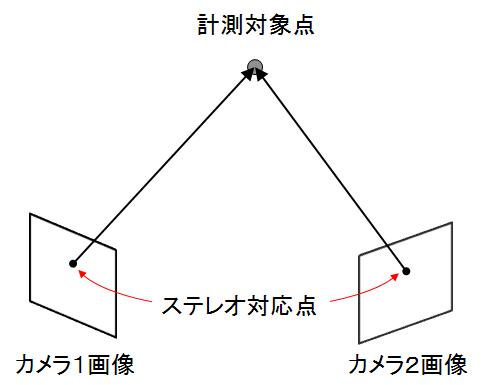
<計測対象点とステレオ対応点の関係>
高精度の計測には多数の対応点の画像中位置がサブピクセル単位で必要なため、ソフトウェアで自動的に検出することが普通です。
しかし、どんな場合でもステレオ対応点を完全に検出する方法は世の中にありません。
当社では以下のように対応点を検出するいくつかの手法を用意しており、計測対象によって適切なものを選んだり、組み合わせたりします。
- マーカー法
特定の図形をマーカーとして、計測したい箇所に置いて撮影します。 計測点数が少ないときや画像中の特徴を抽出することが困難なときに使用します。 当社ではクロス型や円型のマーカーを使っています。
●マーカー法を用いた3次元計測ライブラリ
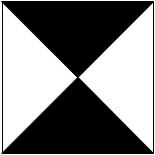
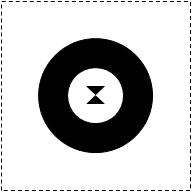
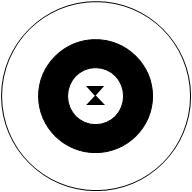
<クロス型および円型マーカーの例>
- ステレオ相関法
2つの画像の部分毎の輝度分布の相関計算で対応点(画像中の模様が似たところ)を探します。 模様のある、曲面の多い対象の計測に適しています。対象に模様をつけるためにパターン光を投影することもあります。
●ステレオ相関法を用いた3次元計測ライブラリ - 線ベース法
撮影した画像に対してエッジ抽出を行い、線分構造解析などをした上で対応点を探します。 そのため工業部品のように模様がなく、輪郭のはっきりした物体の計測に適しています。 線ベース法は産総研の高機能3次元視覚システムVVVに由来しています。
●線ベース法を用いた3次元計測・認識ライブラリ - レーザー法
より高精度に隙間や形状を計測したいときに適しています。ラインレーザー光を対象物に投射してその輝線をもとに対応点を探します。 ただし対象物によっては反射などでレーザーが使用できず、適用できない場合もあります。
- 位相シフト法
位相を変えた縞パターンをプロジェクタを使って対象物に投影し計測します。広範囲に高精度な結果が得られます。