ソリューション:実績事例
ロボット制御への応用例
線ベースステレオ法による缶のピッキング(2009国際ロボット展出展)
線ベースステレオ法による缶の認識結果を用いてロボット制御を行い、バラバラに傾いた缶でも最適な角度からロボットハンドでつかむことができる。

<ピッキングの様子>
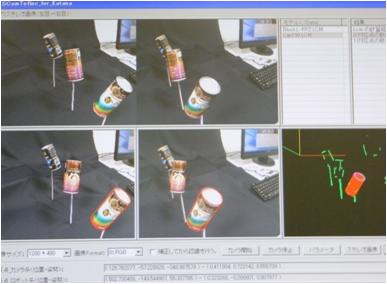
<缶の認識の様子>

線ベースステレオ法による缶のピッキング(2009国際ロボット展出展)
線ベースステレオ法による缶の認識結果を用いてロボット制御を行い、バラバラに傾いた缶でも最適な角度からロボットハンドでつかむことができる。
<ピッキングの様子>
<缶の認識の様子>